第 13 章 迁移学习
实际应用中很多任务的数据的标注成本很高,无法获得充足的训练数据,这种情况可以使用迁移学习(transfer learning)。假设 A、B 是两个相关的任务,A 任务有很多训练数据,就可以把从 A 任务中学习到的某些可以泛化知识迁移到 B 任务。迁移学习有很多分类,本章介绍了领域自适应(domain adaptation)和领域泛化(domain generalization)。
13.1 领域偏移
目前为止,我们学习了很多深度学习的模型,所以训练一个分类器比较简单,比如要训练数字的分类器,给定训练数据,训练好一个模型,应用在测试数据就结束了。
如图 13.1 所示,数字识别这种简单的问题,在基准数据集 MNIST [1] 上能做到
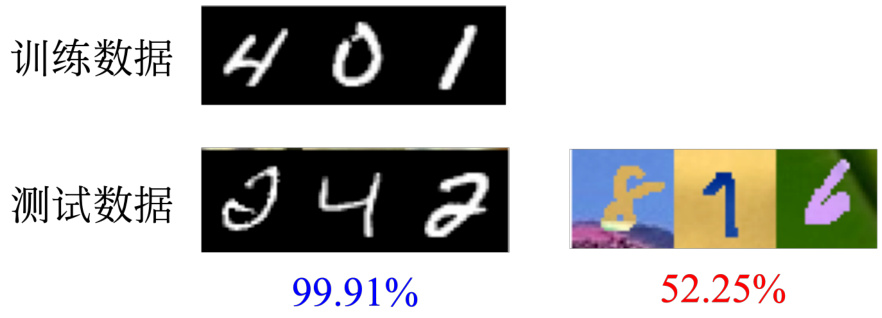
图 13.1 数据分布不同导致的问题
领域偏移其实有很多种不同的类型,模型输入的数据分布有变化的状况是一种类型。另外一种类型是,输出的分布也可能有变化。比如在训练数据上面,可能每一个数字出现的概率都是一样的,但是在测试数据上面,可能每一个数字输出的概率是不一样的,有可能某一个数字它输出的概率特别大,这也是有可能的。还有一种比较罕见状况的类型是,输入跟输出虽然分布可能是一样的,但它们之间的关系变了。比如同一张图片在训练数据里的标签为
接下来我们专注于输入数据不同的领域偏移。如图 13.2 所示,接下来我们称测试数据来自目标领域(target domain),训练数据来自源领域(source domain),因此源领域是训练数据,目标领域是测试数据。
在基准数据集上学习时,很多时候无视领域偏移问题,假设训练数据跟测试数据往往有一样的分布,在很多任务上面都有极高的正确率。但在实际应用时,当训练数据跟测试数据有一点差异时,机器的表现可能会比较差,因此需要领域自适应来提升机器的性能。对于领域自适应,训练数据是一个领域,测试数据是另外一个领域,要把某一个领域上学到的信息用到另外一个领域,领域自适应侧重于解决特征空间与类别空间一致,但特征分布不一致的问题。

图 13.2 源领域与目标领域
13.2 领域自适应
接下来介绍下领域自适应,以手写数字识别为例。比如有一堆有标注的训练数据,这些数据来自源领域,用这些数据训练出一个模型,这个模型可以用在不一样的领域。在训练的时候,我们必须要对测试数据所在的目标领域有一些了解。
随着了解的程度不同,领域自适应的方法也不同。如果目标领域上有一大堆有标签的数据,这种情况其实不需要做领域自适应,直接用目标领域的数据训练。如果目标领域上有一点有标签的数据,这种情况可以用领域自适应,可以用这些有标注的数据微调在源领域上训练出来的模型。这边的微调跟 BERT 的微调很像,已经有一个在源领域上训练好的模型,只要拿目标领域的数据跑个两、三个回合就足够了。在这一种情况下,需要注意的问题是,因为目标领域的数据量非常少,所以要小心不要过拟合,不要在目标领域的数据上迭代太多次。在目标数据上迭代太多次,可能会过拟合到目标领域的少量数据上,在真正的测试集的表现可能就不好。
为了避免过拟合的情况,有很多的解决方法,比如调小一点学习率。要让微调前、后的模型的参数不要差很多,或者让微调前、后的模型的输入跟输出的关系,不要差很多等等。
下面主要介绍下在目标领域上有大量未标注的数据的这种情况。这种情况其实是很符合实际会发生的情况。比如在实验室里面训练了一个模型,并想要把它用在真实的场景里面,于是将模型上线。上线后的模型确实有一些人来用,但得到的反馈很差,大家嫌弃系统正确率很低。这种情况就可以用领域自适应的技术,因为系统已经上线后会有人使用,就可以收集到一大堆未标注的数据。这些未标注的数据可以用在源领域上训练一个模型,并用在目标领域。
最基本的想法如图 13.3 所示,训练一个特征提取器(feature extractor)。特征提取器也是一个网络,这个网络输入是一张图片,输出是一个特征向量。虽然源领域与目标领域的图像不一样,但是特征提取器会把它们不一样的部分去除,只提取出它们共同的部分。虽然源领域和目标领域的图片的颜色不同,但特征提取器可以学习到把颜色的信息滤掉,忽略颜色。源领域和目标领域的图片通过特征提取器以后,其得到的特征是没有差异的,分布相同。通过特征提取器可以在源领域上训练一个模型,直接用在目标领域上。通过领域对抗训练(domainadversarial training)可以得到领域无关的表示。
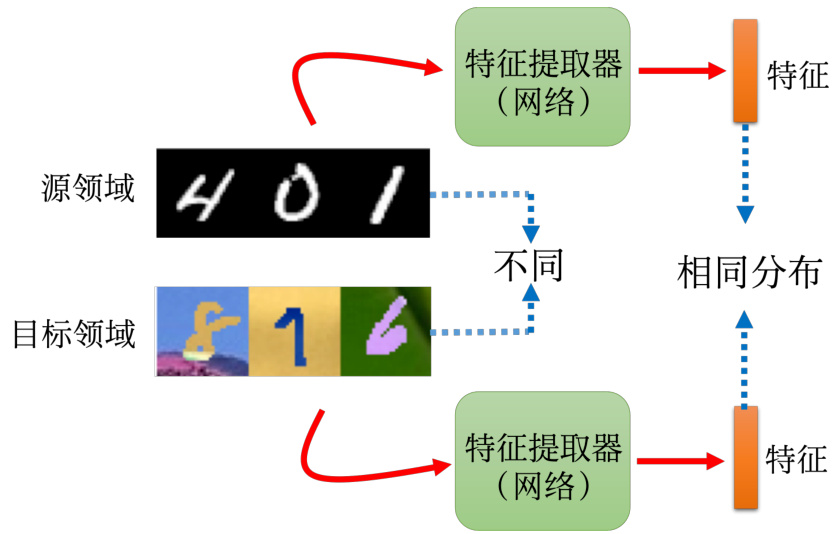
图 13.3 通过特征提取器过滤颜色信息
一般的分类器可分成特征提取器和标签预测器(label predictor)两个部分。图像的分类器输入一张图像,输出分类的结果。假设图像的分类器有 10 层,前 5 层是特征提取器,后 5层是标签预测器。前 5 层可看成特征提取器,一个图像通过前 5 层,其输出是一个向量;如果使用卷积神经网络,其输出是特征映射,但特征映射“拉直”也可以看做是一个向量,该向量再输入到后面 5 层(标签预测器)来产生类别。
Q:为什么分类器的前 5 层是特征提取器,而不是前
图 13.4 给出了特征提取器和标签预测器的训练过程。对于源领域上标注的数据,把源领域的数据“丢”进去,这跟训练一个一般的分类器一样,它通过特征提取器,再通过标签预测器,可以产生正确的答案。但不一样的地方是,目标领域的一堆数据是没有任何标注的,把这些图片“丢”到图像分类器,把特征提取器的输出拿出来看,希望源领域的图片“丢”进去的特征跟目标领域的图片“丢”进去的特征相同。图 13.4 中蓝色的点表示源领域图片的特征,红色的点表示目标领域图片的特征,通过领域对抗训练让蓝色的点跟红色的点分不出差异。
如图 13.5 所示,我们要训练一个领域分类器。领域分类器是一个二元的分类器,其输入是特征提取器输出的向量,其目标是判断这个向量是来自于源领域还是目标领域,而特征提取器学习的目标是要去想办法骗过领域分类器。领域对抗训练非常像是生成对抗网络,特征提取器可看成生成器,领域分类器可看成判别器。但在领域对抗训练里面,特征提取器优势太大了,其要骗过领域分类器很容易。比如特征提取器可以忽略输入,永远都输出一个零向量。这样做领域分类器的输入都是零向量,其也无法判断该向量的领域。但标签预测器也需要特征判断输入的图片的类别,如果特征提取器只会输出零向量,标签预测器无法判断是哪一张图片。特征提取器还是需要产生向量来让标签预测器可以输出正确的预测。因此特征提取器不能永远都输出零向量。
假设标签预测器的参数为
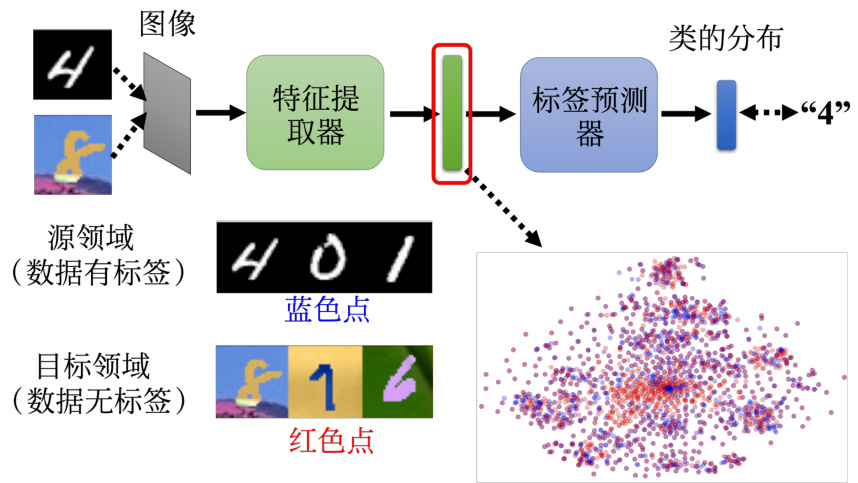
图 13.4 训练特征提取器,让源领域和目标领域的特征无差异[4]
我们要去找一个
标签预测器要让源领域的图像分类越正确越好,领域分类器要让领域的分类越正确越好。而特征提取器站在标签预测器这边,它要去做领域分类器相反的事情,所以特征提取器的损失是标签预测器的损失
假设领域分类器的工作是把源领域跟目标领域分开,根据特征提取器的特征,来判断数据是来自源领域还是目标领域,把源领域和目标领域的两组特征分开。而特征提取器的损失中是
领域对抗训练最原始的论文做了如图 13.6 所示的四个从源领域到目标领域的任务。如果用目标领域的图片训练,目标领域的图片测试,结果如表 13.1 所示,每一个任务正确率都是
领域对抗训练最早的论文发表在 2015 年的 ICML 上面,其比生成对抗网络还要稍微晚一点,不过它们几乎可以是同时期的作品。
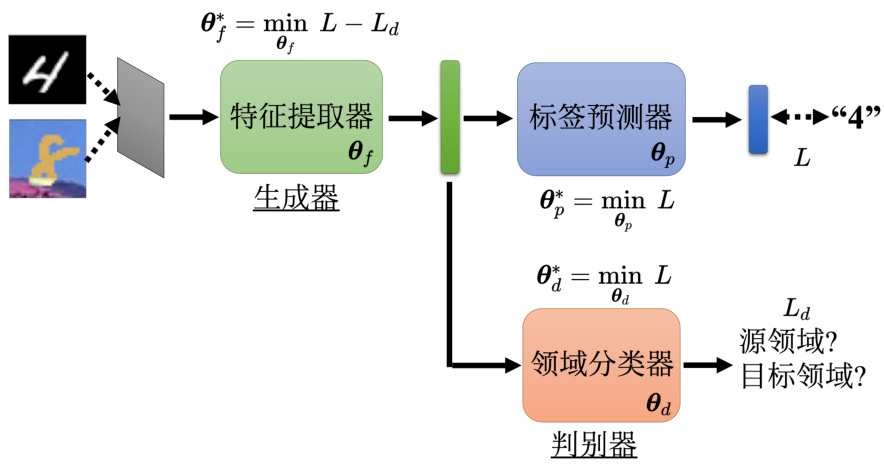
图 13.5 领域对抗训练

图 13.6 领域对抗训练最原始论文使用的任务
刚才这整套想法,有一个小小的问题。用蓝色的圆圈和三角形表示源领域上的两个类别,用正方形来表示目标领域上无类别标签的数据。可以找一个边界去把源领域上的两个类别分开。训练的目标是要让正方形的分布跟圆圈、三角形合起来的分布越接近越好。在图 13.7(a)所示的情况中,红色的点跟蓝色的点是挺对齐在一起的。在图 13.7 (b)所示的情况中,红色的点跟蓝色的点是分布挺接近的。虽然正方形的类别是未知的,但蓝色的圆圈跟蓝色的三角形的决策边界是已知的,应该让正方形远离决策边界。因此两种情况相比,我们更希望在图 13.7 (b)的情况发生,而避免让在图 13.7 (a)的状况发生。
让正方形远离边界(boundary)最简单的做法如图 13.8 所示。把很多无标注的图片先“丢”到特征提取器,再“丢”到标签预测器,如果输出的结果集中在某个类别上,就是离边界远;如果输出的结果每一个类别非常地接近,就是离边界近。除了上述比较的简单的方法外,还可以使用 DIRT-T[5]、最大分类器差异(maximum classifier discrepancy)[6] 等方法。这些方法在领域自适应中是不可或缺的。
目前为止都假设源领域跟目标领域的类别都要是一模一样,比如图像分类,源领域有老虎、狮子跟狗,目标领域也应该要有老虎、狮子跟狗,但实际上目标领域是没有标签的,其里面的类别是未知的。如图 13.9 所示,实线的椭圆圈代表源领域里面有的东西,虚线的椭圆圈代表目标领域里面有的东西。图 13.9(a)中源领域里面的东西比较多,目标领域里面的东西比较少;图 13.9(b)中源领域里面的东西比较少,目标领域的东西比较多。图 13.9(c)中两者虽然有交集,但是各自都有独特的类别。
表 13.1 不同源领域和目标领域的数字图像分类的准确率
| 方法 | 源领域 目标领域 | MNIST MNIST-M | 合成数字 SVHN | SVHN MNIST | 合成标志 GTSRB |
| 只使用源领域数据训练 | 57.49% | 86.65% | 59.19% | 74.00% | |
| 使用领域对抗训练 | 81.49% | 90.48% | 71.07% | 88.66% | |
| 只使用目标领域数据训练 | 98.91% | 92.44% | 99.51% | 99.87% |
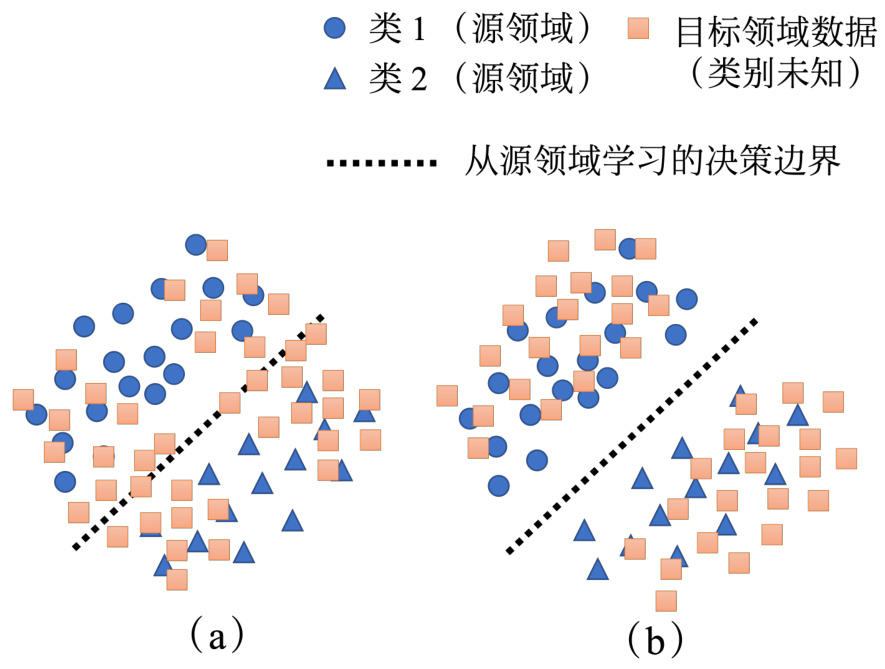
图 13.7 决策边界
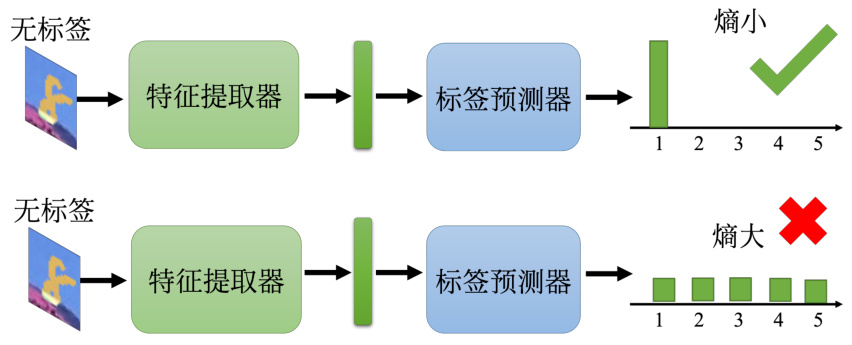
图 13.8 离边界越远越好
强制把源领域跟目标领域完全对齐在一起是有问题的,比如图 13.9(c)里面,要让源领域的数据跟目标领域的数据的特征完全匹配,这意味是要让老虎去变得跟狗像,或者让老虎变得跟狮子像,这样老虎这个类别就不能区分了。源领域跟目标领域有不同标签问题的解决方法,可参考论文“Universal Domain Adaptation”[7]。
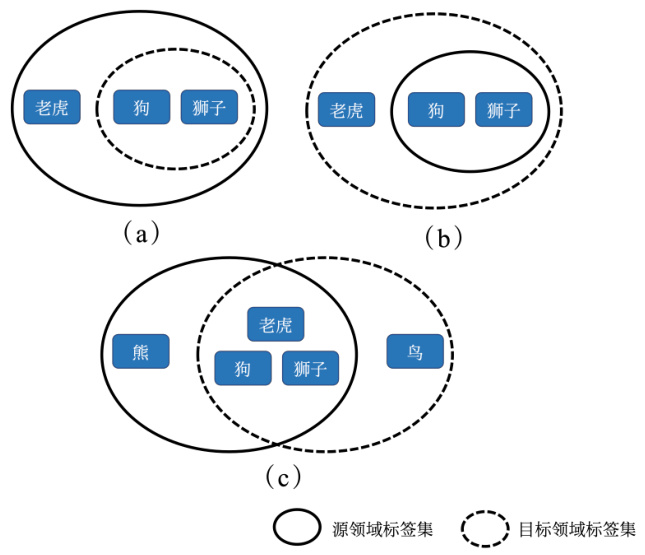
图 13.9 强制完全对齐源领域跟目标领域的问题
Q:如果特征提取器是卷积神经网络,而不是线性层(linear layer)。领域分类器输入是特征映射,特征映射本来就有空间的关系。把两个领域“拉”在一起会不会有影响隐空间(latent space),让隐空间没能学到本来希望它学到的东西?
A:会有影响。领域自适应训练需要同时做好两个方面的事:一方面要骗领域分类器,另一方面是要让分类变正确。即不仅要把两个领域对齐在一起,还要让隐空间的分布是正确的。比如我们觉得 1 跟 7 比较像,为了要让分类器做好,特征提取器会让 1 跟7 比较像。因为要提高标签预测器的性能,所以隐表示(latent representation)里面的空间仍然是一个比较好的隐空间。但如果给领域分类器就是要骗过领域分类器,这件事情的权重太大。模型就会学到只想骗过领域分类器,它就不会产生好的隐空间。
但是有一个可能是目标领域的数据不仅没有标签,而且还很少,比如目标领域只有一张图片,也就无法跟源领域对齐。这种情况可使用测试时训练(Testing Time Training,TTT)方法,读者可参考论文“Test-Time Training with Self-Supervision for Generalization underDistribution Shifts”[8]。
13.3 领域泛化
对目标领域一无所知,并不是要适应到某一个特定的领域上的问题通常称为领域泛化。领域泛化可又分成两种情况。一种情况是训练数据非常丰富,包含了各种不同的领域,测试数据只有一个领域。如图 13.10(a)所示,比如要做猫狗的分类器,训练数据里面有真实的猫跟狗的照片、素描的猫跟狗的照片、水彩画的猫跟狗的照片,期待因为训练数据有多个领域,模型可以学到如何弥平领域间的差异。当测试数据是卡通的猫跟狗时,模型也可以处理,具体细节可参考论文“Domain Generalization with Adversarial Feature Learning”[9] 。另外一种情况如图 13.10(b)所示,训练数据只有一个领域,而测试数据有多种不同的领域。虽然只有一个领域的数据,但可以想个数据增强的方法去产生多个领域的数据,具体可参考论文“Learningto Learn Single Domain Generalization”[10]。
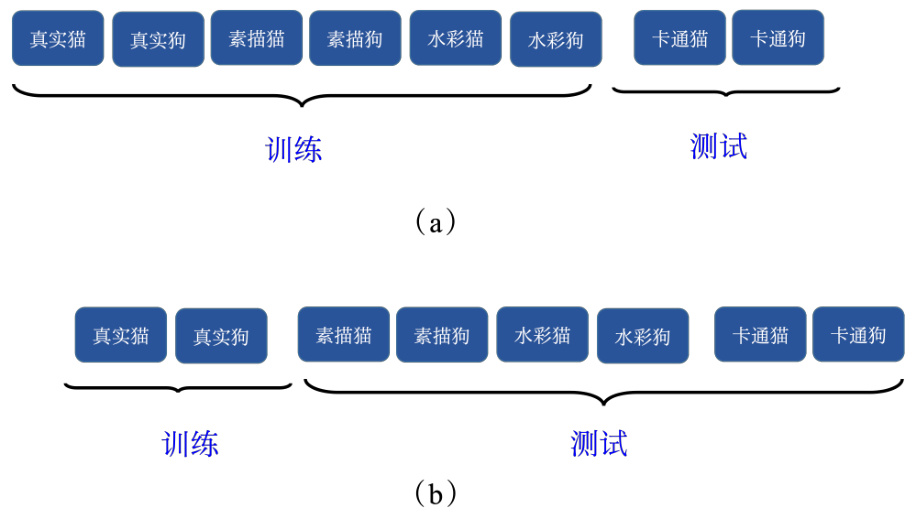
图 13.10 领域泛化示例
参考文献
[1] LECUN Y, BOTTOU L, BENGIO Y, et al. Gradient-based learning applied to document recognition[J]. Proceedings of the IEEE, 1998, 86(11): 2278-2324.
[2] AN S, LEE M, PARK S, et al. An ensemble of simple convolutional neural network models for mnist digit recognition[J]. arXiv preprint arXiv:2008.10400, 2020.
[3] GANIN Y, USTINOVA E, AJAKAN H, et al. Domain-adversarial training of neural networks[J]. The journal of machine learning research, 2016, 17(1): 2096-2030.
[4] GANIN Y, LEMPITSKY V. Unsupervised domain adaptation by backpropagation[C]// International conference on machine learning. PMLR, 2015: 1180-1189.
[5] SHU R, BUI H H, NARUI H, et al. A dirt-t approach to unsupervised domain adaptation [J]. arXiv preprint arXiv:1802.08735, 2018.
[6] SAITO K, WATANABE K, USHIKU Y, et al. Maximum classifier discrepancy for unsupervised domain adaptation[C]//Proceedings of the IEEE conference on computer vision and pattern recognition. 2018: 3723-3732.
[7] YOU K, LONG M, CAO Z, et al. Universal domain adaptation[C]//Proceedings of the IEEE/CVF conference on computer vision and pattern recognition. 2019: 2720-2729.
[8] SUN Y, WANG X, LIU Z, et al. Test-time training with self-supervision for generalization under distribution shifts[C]//International conference on machine learning. PMLR, 2020: 9229-9248.
[9] LI H, PAN S J, WANG S, et al. Domain generalization with adversarial feature learning [C]//Proceedings of the IEEE conference on computer vision and pattern recognition. 2018: 5400-5409.
[10] QIAO F, ZHAO L, PENG X. Learning to learn single domain generalization[C]// Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition. 2020: 12556-12565.