近端策略优化(ppo)
文章来源:详解近端策略优化
0.引言
ppo其实就是策略梯度的一种变形。首先介绍一下同策略(on-policy)与异策略(off-policy)的区别。
在强化学习里面,需要学习的其实就是一个智能体。如果要学习的智能体跟和环境互动的智能体是同一个的话,称之为同策略。如果要学习的智能体跟和环境互动的智能体不是同一个的话,称之为异策略。策略梯度是同策略的算法。
1. 同策略的不足之处
首先回顾一下PG的期望奖励值,公式如下。
上面更新的公式中的
2. 改进同策略的思路
策略梯度是同策略的算法,所以非常耗费时间,那么一个可能的改进思路是将同策略变成异策略。简单的思路就是用另外一个策略
3. 同策略到异策略的具体实现
那么问题来了, 怎么找到这样的一个演员
首先介绍一个名词,重要性采样(importance sampling)。 假设有一个函数
现在另外一个问题也来了,假设不能在分布
因为上式是假设
整理得下式,
这样就可以对分布
这边是从
现在要做的事情就是把重要性采样用在异策略的情况,把同策略训练的算法改成异策略训练的算法。 怎么改呢,如下式所示,用另外一个策略
实际在做策略梯度的时候,并不是给整个轨迹状态-动作的对会分开来计算。实际上更新梯度的时候,如下式所示。
用演员
上式中的
接下来,可以拆解
于是可得公式
这里需要做一件事情,假设模型是
为什么可以这样假设呢?一种直观的解释就是
所以实际上,可以从梯度去反推原来的目标函数,可以用
4. PPO
注意,由于在 PPO 中
上面通过重要性采样把同策略换成异策略,但重要性采样有一个问题:如果
PPO在训练的时候,多加一个约束项。 这个约束是
- 一项是优化本来要优化的东西
- 另一项是一个约束。这个约束就好像正则化的项一样,作用是希望最后学习出来的
与 尽量不用差太多。
PPO算法公式如下。
4.1 TRPO
PPO 有一个前身:信任区域策略优化(trust region policy optimization,TRPO),TRPO 的式子如下式所示。
TRPO 与 PPO 不一样的地方是约束项摆的位置不一样,PPO 是直接把约束放到要优化的式子里,可以直接用梯度上升的方法最大化这个式子。但TRPO是把 KL 散度当作约束,它希望
4.2 PPO算法的两个主要变种
(1)近端策略优化惩罚(PPO-penalty)
首先初始化一个策略的参数状态-动作的对。 根据
上述KL散度前需要乘一个权重
(2)近端策略优化裁剪(PPO-clip)
如果你觉得算KL散度很复杂,另外一种PPO变种即近端策略优化裁剪。近端策略优化裁剪要去最大化的目标函数如下式所示,式子里面就没有 KL 散度。
上式看起来很复杂,其实很简单,它想做的事情就是希望
- 操作符
min作用是在第一项和第二项中选择最小的。 - 第二项前面有个裁剪(clip)函数,裁剪函数是指:在括号里有三项,如果第一项小于第二项,则输出
;如果第一项大于第三项的话,则输出 。 是一个超参数,要需要调整,一般设置为0.1或0.2 。
举个栗子,假设设
在上式中,如果
详细看看clip函数到底算的是什么。

图1. clip函数
横轴是
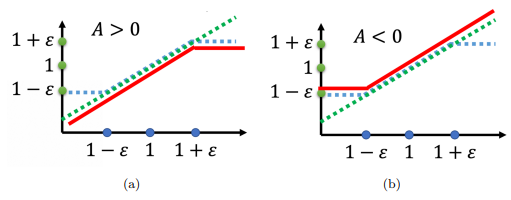
图2. clip函数详细图
如图 2-a 所示,
这其实就是控制
如果 状态-动作的对是好的,希望增加这个状态-动作对的概率。也就是想要让
假设
如果 状态-动作对是不好的,希望把
5. 代码实现
案例:倒立摆问题。钟摆以随机位置开始,目标是将其向上摆动,使其保持直立。 测试环境:Pendulum-v1
动作:往左转还是往右转,用力矩来衡量,即力乘以力臂。范围[-2,2]:(连续空间)
状态:cos(theta), sin(theta) , thetadot。
奖励:越直立拿到的奖励越高,越偏离,奖励越低。奖励的最大值为0。
定义网络结构:
class FeedForwardNN(nn.Module):
def __init__(self, in_dim, out_dim):
super(FeedForwardNN, self).__init__()
self.layer1 = nn.Linear(in_dim, 64)
self.layer2 = nn.Linear(64, 64)
self.layer3 = nn.Linear(64, out_dim)
def forward(self, obs):
if isinstance(obs, np.ndarray):
obs = torch.tensor(obs, dtype=torch.float)
activation1 = F.relu(self.layer1(obs))
activation2 = F.relu(self.layer2(activation1))
output = self.layer3(activation2)
return output定义PPO类:
class PPO:
def __init__(self, policy_class, env, **hyperparameters):
# PPO 初始化用于训练的超参数
self._init_hyperparameters(hyperparameters)
# 提取环境信息
self.env = env
self.obs_dim = env.observation_space.shape[0]
self.act_dim = env.action_space.shape[0]
# 初始化演员和评论家网络
self.actor = policy_class(self.obs_dim, self.act_dim)
self.critic = policy_class(self.obs_dim, 1)
# 为演员和评论家初始化优化器
self.actor_optim = Adam(self.actor.parameters(), lr=self.lr)
self.critic_optim = Adam(self.critic.parameters(), lr=self.lr)
# 初始化协方差矩阵,用于查询actor网络的action
self.cov_var = torch.full(size=(self.act_dim,), fill_value=0.5)
self.cov_mat = torch.diag(self.cov_var)
# 这个记录器将帮助我们打印出每个迭代的摘要
self.logger = {
'delta_t': time.time_ns(),
't_so_far': 0, # 到目前为止的时间步数
'i_so_far': 0, # 到目前为止的迭代次数
'batch_lens': [], # 批次中的episodic长度
'batch_rews': [], # 批次中的rews回报
'actor_losses': [], # 当前迭代中演员网络的损失
}
def learn(self, total_timesteps):
print(f"Learning... Running {self.max_timesteps_per_episode} timesteps per episode, ", end='')
print(f"{self.timesteps_per_batch} timesteps per batch for a total of {total_timesteps} timesteps")
t_so_far = 0 # 到目前为止仿真的时间步数
i_so_far = 0 # 到目前为止,已运行的迭代次数
while t_so_far < total_timesteps:
# 收集批量实验数据
batch_obs, batch_acts, batch_log_probs, batch_rtgs, batch_lens = self.rollout()
# 计算收集这一批数据的时间步数
t_so_far += np.sum(batch_lens)
# 增加迭代次数
i_so_far += 1
# 记录到目前为止的时间步数和到目前为止的迭代次数
self.logger['t_so_far'] = t_so_far
self.logger['i_so_far'] = i_so_far
# 计算第k次迭代的advantage
V, _ = self.evaluate(batch_obs, batch_acts)
A_k = batch_rtgs - V.detach()
# 将优势归一化 在理论上不是必须的,但在实践中,它减少了我们优势的方差,使收敛更加稳定和快速。
# 添加这个是因为在没有这个的情况下,解决一些环境的问题太不稳定了。
A_k = (A_k - A_k.mean()) / (A_k.std() + 1e-10)
# 在其中更新我们的网络。
for _ in range(self.n_updates_per_iteration):
V, curr_log_probs = self.evaluate(batch_obs, batch_acts)
# 重要性采样的权重
ratios = torch.exp(curr_log_probs - batch_log_probs)
surr1 = ratios * A_k
surr2 = torch.clamp(ratios, 1 - self.clip, 1 + self.clip) * A_k
# 计算两个网络的损失。
actor_loss = (-torch.min(surr1, surr2)).mean()
critic_loss = nn.MSELoss()(V, batch_rtgs)
# 计算梯度并对actor网络进行反向传播
# 梯度清零
self.actor_optim.zero_grad()
# 反向传播,产生梯度
actor_loss.backward(retain_graph=True)
# 通过梯度下降进行优化
self.actor_optim.step()
# 计算梯度并对critic网络进行反向传播
self.critic_optim.zero_grad()
critic_loss.backward()
self.critic_optim.step()
self.logger['actor_losses'].append(actor_loss.detach())
self._log_summary()
if i_so_far % self.save_freq == 0:
torch.save(self.actor.state_dict(), './ppo_actor.pth')
torch.save(self.critic.state_dict(), './ppo_critic.pth')
def rollout(self):
"""
这就是我们从实验中收集一批数据的地方。由于这是一个on-policy的算法,我们需要在每次迭代行为者/批评者网络时收集一批新的数据。
"""
batch_obs = []
batch_acts = []
batch_log_probs = []
batch_rews = []
batch_rtgs = []
batch_lens = []
# 一回合的数据。追踪每一回合的奖励,在回合结束的时候会被清空,开始新的回合。
ep_rews = []
# 追踪到目前为止这批程序我们已经运行了多少个时间段
t = 0
# 继续实验,直到我们每批运行超过或等于指定的时间步数
while t < self.timesteps_per_batch:
ep_rews = [] 每回合收集的奖励
# 重置环境
obs = self.env.reset()
done = False
# 运行一个回合的最大时间为max_timesteps_per_episode的时间步数
for ep_t in range(self.max_timesteps_per_episode):
if self.render and (self.logger['i_so_far'] % self.render_every_i == 0) and len(batch_lens) == 0:
self.env.render()
# 递增时间步数,到目前为止已经运行了这批程序
t += 1
# 追踪本批中的观察结果
batch_obs.append(obs)
# 计算action,并在env中执行一次step。
# 注意,rew是奖励的简称。
action, log_prob = self.get_action(obs)
obs, rew, done, _ = self.env.step(action)
# 追踪最近的奖励、action和action的对数概率
ep_rews.append(rew)
batch_acts.append(action)
batch_log_probs.append(log_prob)
if done:
break
# 追踪本回合的长度和奖励
batch_lens.append(ep_t + 1)
batch_rews.append(ep_rews)
# 将数据重塑为函数描述中指定形状的张量,然后返回
batch_obs = torch.tensor(batch_obs, dtype=torch.float)
batch_acts = torch.tensor(batch_acts, dtype=torch.float)
batch_log_probs = torch.tensor(batch_log_probs, dtype=torch.float)
batch_rtgs = self.compute_rtgs(batch_rews)
# 在这批中记录回合的回报和回合的长度。
self.logger['batch_rews'] = batch_rews
self.logger['batch_lens'] = batch_lens
return batch_obs, batch_acts, batch_log_probs, batch_rtgs, batch_lens
def compute_rtgs(self, batch_rews):
batch_rtgs = []
# 遍历每一回合,一个回合有一批奖励
for ep_rews in reversed(batch_rews):
# 到目前为止的折扣奖励
discounted_reward = 0
# 遍历这一回合的所有奖励。我们向后退,以便更顺利地计算每一个折现的回报
for rew in reversed(ep_rews):
discounted_reward = rew + discounted_reward * self.gamma
batch_rtgs.insert(0, discounted_reward)
# 将每个回合的折扣奖励的数据转换成张量
batch_rtgs = torch.tensor(batch_rtgs, dtype=torch.float)
return batch_rtgs
def get_action(self, obs):
mean = self.actor(obs)
# 用上述协方差矩阵中的平均行动和标准差创建一个分布。
dist = MultivariateNormal(mean, self.cov_mat)
action = dist.sample()
log_prob = dist.log_prob(action)
return action.detach().numpy(), log_prob.detach()
def evaluate(self, batch_obs, batch_acts):
"""
估算每个观察值,以及最近一批actor网络迭代中的每个action的对数prob。
"""
# 为每个batch_obs查询critic网络的V值。V的形状应与batch_rtgs相同。
V = self.critic(batch_obs).squeeze()
# 使用最近的actor网络计算批量action的对数概率。
mean = self.actor(batch_obs)
dist = MultivariateNormal(mean, self.cov_mat)
log_probs = dist.log_prob(batch_acts)
# 返回批次中每个观察值的值向量V和批次中每个动作的对数概率log_probs
return V, log_probs最终的动画效果如下图:

训练结果如下所示:
Average Episodic Length:200
Average Episodic Return:-76.99
Average actor_loss:0.0017
Average value_loss:0.49982
Iteration:100006. 总结
PPO其实就是避免在使用重要性采样时由于在
7. 参考文献
[1]《Reinforcement+Learning: An+Introduction》
[2] https://medium.com/analytics-vidhya/coding-ppo-from-scratch-with-pytorch-part-1-4-613dfc1b14c8